publications
2025
2025
-
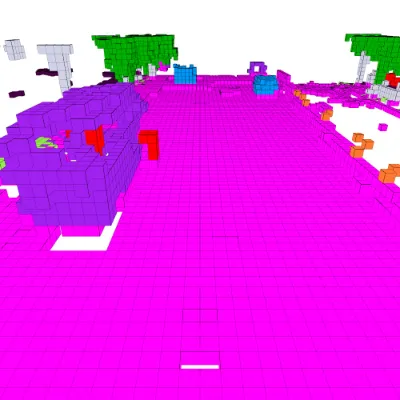 AGO: Adaptive Grounding for Open World 3D Occupancy PredictionInternational Conference on Computer Vision (ICCV), 2025
AGO: Adaptive Grounding for Open World 3D Occupancy PredictionInternational Conference on Computer Vision (ICCV), 2025


2024
2024


2023
2023

2022
2022
-
 Unsupervised Domain Adaptive Object Detection with Class Label Shift Weighted Local FeaturesECCV Workshop on Learning from Limited and Imperfect Data (L2ID), 2022
Unsupervised Domain Adaptive Object Detection with Class Label Shift Weighted Local FeaturesECCV Workshop on Learning from Limited and Imperfect Data (L2ID), 2022


2021
2021

2019
2019
-
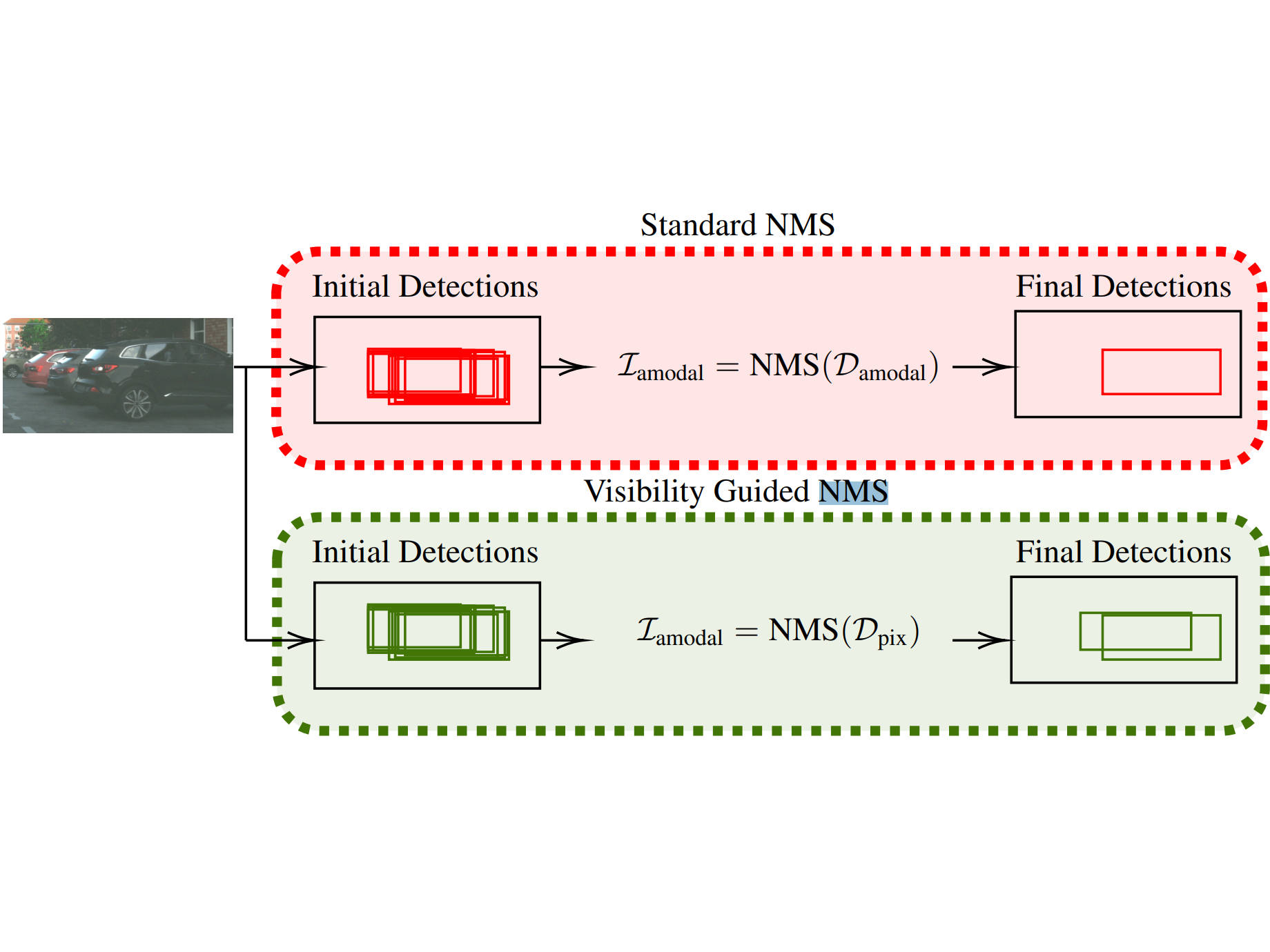 Visibility Guided NMS: Efficient Boosting of Amodal Object Detection in Crowded Traffic ScenesNeuRIPS Workshop on Machine Learning for Autonomous Driving, 2019
Visibility Guided NMS: Efficient Boosting of Amodal Object Detection in Crowded Traffic ScenesNeuRIPS Workshop on Machine Learning for Autonomous Driving, 2019
